Plier, oui. Casser, jamais.
ROBOPOLY
Rôle : Conception mécanique du robot, calcul des moteurs et modélisation 3D sous SolidWorks
Contexte : Projet réalisé à l’ESME dans le cadre du module de mécatronique appliquée, visant à concevoir un système robotisé complet.
Dans le cadre du projet de fin d’année du cycle ingénieur (3ᵉ année), j’ai participé à la conception d’un bras robotisé multi-axes, en assumant principalement deux missions clés :
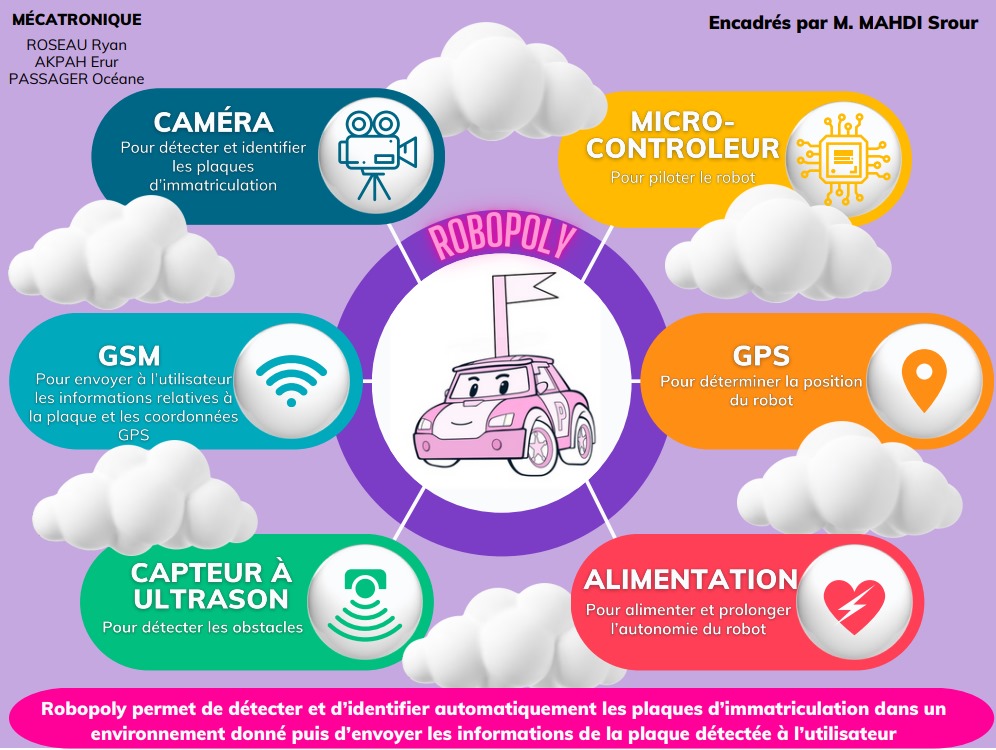
Concevoir un robot mobile autonome capable de détecter et reconnaître les plaques d’immatriculation grâce à une caméra embarquée et un système d’intelligence artificielle.
Le projet visait à intégrer l’ensemble des compétences en mécanique, électronique, informatique embarquée et vision artificielle, afin de développer un prototype complet combinant :une base roulante motorisée et stable,
un système de détection visuelle basé sur l’IA (YOLOv7 + OCR),
et une communication sans fil (GSM/GPS) pour la localisation et la transmission des données en temps réel.
Conception mécanique complète du robot : définition du châssis, choix des matériaux et intégration des composants (moteurs, capteurs, alimentation).
Calculs de dimensionnement moteur : détermination du couple, de la vitesse et de la puissance nécessaires selon la masse et les contraintes de déplacement.
Modélisation 3D sous SolidWorks : création des pièces, assemblage virtuel et validation structurelle avant la fabrication du robot.
Architecture globale du système
Le robot se compose de trois sous-systèmes :
IA : détection et reconnaissance de plaques via YOLOv7 et Tesseract OCR.
Mécanique : châssis à quatre roues motrices et structure en plexiglas/bois.
Électronique : alimentation, contrôle moteur, communication et traitement embarqué (partie que j’ai conçue et programmée).
Interaction avec l’IA et les autres sous-systèmes
Le microcontrôleur STM32 recevait les informations de détection du modèle YOLOv7, puis transmettait la position et les coordonnées des plaques détectées.
Cette communication bidirectionnelle assurait la cohérence entre la vision embarquée et le mouvement autonome du robot.
Partie électronique
1. Choix et intégration du microcontrôleur STM32F103C8T6
J’ai choisi et configuré le microcontrôleur ARM Cortex-M3 pour son équilibre entre puissance de calcul (72 MHz), faible consommation, et nombreuses interfaces (UART, SPI, I²C, GPIO).
Il gérait :
la réception des données des capteurs,
le contrôle des moteurs via les drivers (Pont en H),
et la communication avec les modules GSM et GPS.
2. Conception de l’alimentation et régulation de tension
J’ai dimensionné et connecté le circuit d’alimentation principal :
Batterie Li-Po 14,8 V / 3000 mAh,
Régulateur LD33V (sortie 3,3 V pour le microcontrôleur),
Convertisseur DC-DC 5 V pour les capteurs et modules de communication.
Un soin particulier a été apporté à la protection électrique via fusibles et découplage afin d’éviter toute surtension ou surchauffe.
3. Gestion du Pont en H et contrôle moteur
J’ai réalisé le câblage entre le microcontrôleur et les drivers pour piloter les deux moteurs continus :
Broches RPWM/LPWM → contrôle de la vitesse et du sens de rotation,
Broches R_EN / L_EN → activation des sorties et gestion de la puissance.
Cette configuration permettait un contrôle différentiel fluide pour assurer la mobilité du robot.
4. Communication et sécurité
J’ai intégré le module GSM SIM800C pour la transmission des données à distance, et le module GPS Neo-M8N pour la géolocalisation.
Les connexions ont été établies via UART, et un système de mise en veille automatique a été configuré pour limiter la consommation d’énergie.
Problèmes rencontrés et solutions
Perte du code microcontrôleur suite à une panne de l’ordinateur → sauvegarde mise en place sur GitHub.
Consommation excessive de la batterie → proposition d’une batterie VRLA plus stable et économique.
Optimisation du pont en H pour limiter la surchauffe lors de fortes intensités.
Modélisation 3D Solidworks
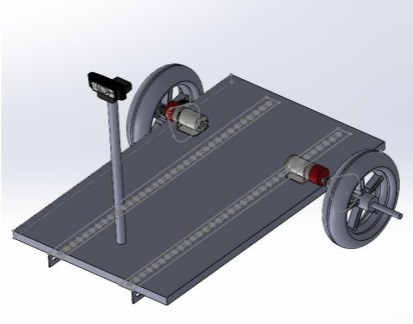
Résultat
Le prototype Robopoly a permis de valider la faisabilité d’un robot autonome combinant détection d’objets, mobilité et communication sans fil.
Ce projet m’a permis de renforcer mes compétences en systèmes embarqués, conception électronique, et intégration logicielle/hardware.

Travaillons ensemble 🤝
Vous recherchez un profil technique, curieux et rigoureux pour renforcer votre équipe ou collaborer sur un projet d’ingénierie ? Contactez-moi pour échanger sur vos besoins en développement, mécatronique ou automatisation.
À propos
Ingénieur en mécatronique et passionné de technologies numériques, je développe aussi des projets web et cultive ma passion pour le sport